Overview
SPADE extends the SKIPP pipeline by introducing diffusion-based expert guidance into behavioral cloning. A high-capacity diffusion model is trained offline on expert demonstrations and then used to guide the training of a compact, deployable BC network. We also introduce an image-conditioned variant (Cond-DBC) using FiLM conditioning, which provides more focused guidance signals. The framework includes a fully reworked, open-source annotation tool built on ROS 2.
ROS 2 Annotation Tool
A fully open-source annotation pipeline built using ROS 2, enabling reproducible expert demonstration collection through interactive waypoint selection in a simulated 3D environment.
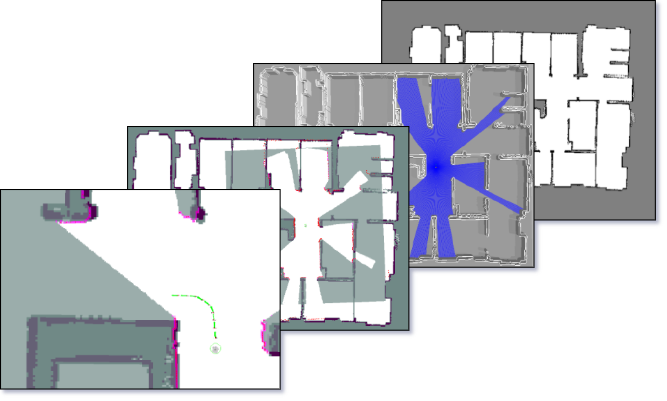
Annotation pipeline: global occupancy grid, 3D environment, local costmap, and path execution.