Proposed Method
SKIPP frames path planning as an imitation learning problem. Instead of relying on complex reward engineering, users draw the desired navigation behavior directly on a 2D map. These sketches are post-processed and used to train a lightweight U-Net model through Behavioral Cloning. The trained model is integrated within NVIDIA's ISAAC SDK for real-time end-to-end navigation.
Input Encoding
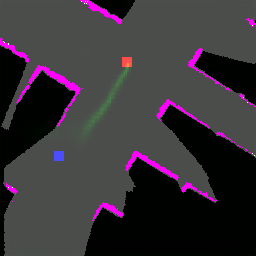
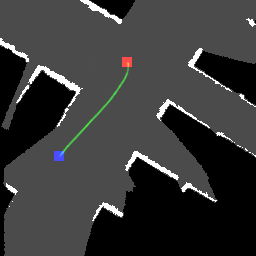
Each input instance is a multi-channel image encoding:
- Occupancy grid — obstacles in white, navigable areas in grey, unobserved in black
- Goal position — overlayed as a blue rectangle
- Robot position — encoded as a red rectangle
- Expert path — hand-drawn sketch processed and overlayed in green
Input encoding: occupancy grid with start, goal, and expert path overlayed.
Model Architecture
The network uses a U-Net architecture with an encoder-decoder structure and skip connections. The encoder progressively downsamples the input while capturing contextual features. The decoder restores fine-grained spatial details. A Sigmoid activation produces a binary mask representing the planned path. The model is trained with Binary Cross Entropy loss.
SKIPP Model Architecture — encoder-decoder with skip connections.
Expert Behaviors
The dataset is divided into two behaviors commonly demanded in industrial AMR use cases. The annotation tool allows experts to intuitively draw desired navigation paths which are then post-processed (thinning, DBSCAN clustering, spline smoothing) into actionable trajectories.
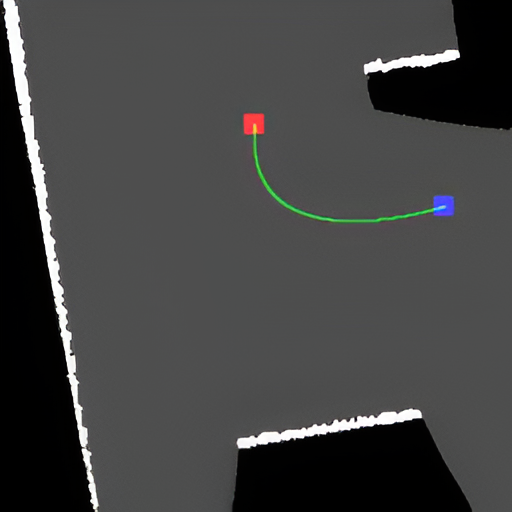
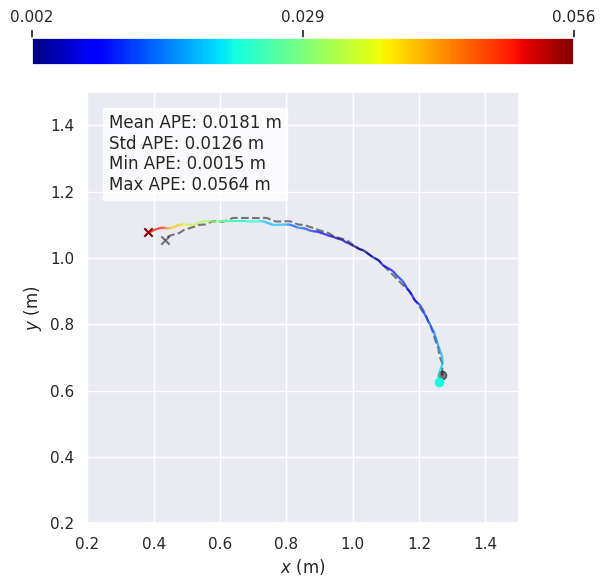
L-shape behavior
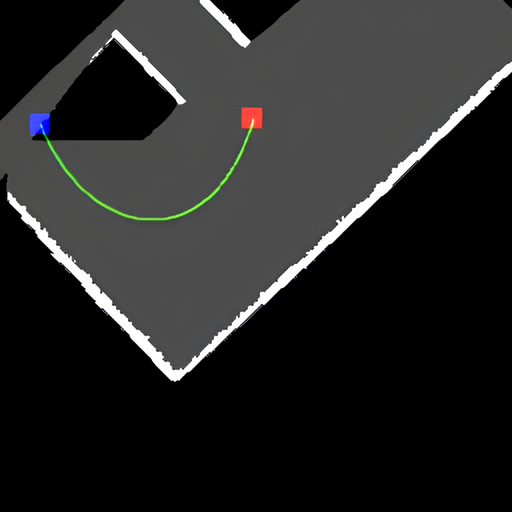
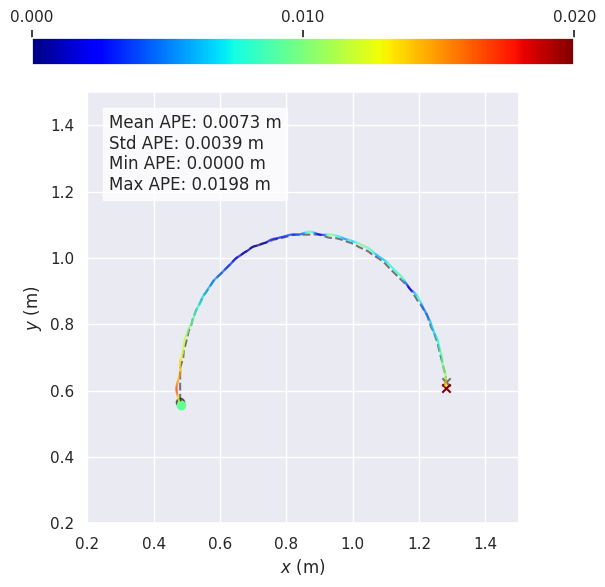
U-shape behavior